
¿Qué son los mecanismos?
Los mecanismos son elementos destinados a transmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) a un elemento receptor. Permiten al ser humano realizar determinados trabajos con mayor comodidad y menor esfuerzo.
Tipos de mecanismos
Según su función, podemos clasificar los mecanismos en:
- Mecanismos de transmisión de movimientos. Transmiten a otro punto el movimiento producido por un elemento motriz (motor). Existen de dos tipos:
- Mecanismos de transmisión lineal: palanca, polea fija, polea móvil y polipasto.
- Mecanismos de transmisión circular: sistema de polea con correa, engranajes, ruedas de fricción, tornillo sin fin y sistema de engranajes con cadena.
- Mecanismos de transformación en movimiento. Transforman un movimiento circular en un movimiento rectilíneo, o viceversa. Existen de dos tipos:
- Mecanismos de transformación de movimiento circular en rectilíneo: piñón-cremallera, tornillo-tuerca, manivela-torno.
- Mecanismos de transformación de movimiento circular en rectilíneo alternativo: biela-manivela, leva, cigüeñal y excéntrica.
- Mecanismos de transmisión de movimientos. Transmiten a otro punto el movimiento producido por un elemento motriz (motor). Existen de dos tipos:
- Mecanismos de transmisión lineal: palanca, polea fija, polea móvil y polipasto.
- Mecanismos de transmisión circular: sistema de polea con correa, engranajes, ruedas de fricción, tornillo sin fin y sistema de engranajes con cadena.
- Mecanismos de transformación en movimiento. Transforman un movimiento circular en un movimiento rectilíneo, o viceversa. Existen de dos tipos:
- Mecanismos de transformación de movimiento circular en rectilíneo: piñón-cremallera, tornillo-tuerca, manivela-torno.
- Mecanismos de transformación de movimiento circular en rectilíneo alternativo: biela-manivela, leva, cigüeñal y excéntrica.
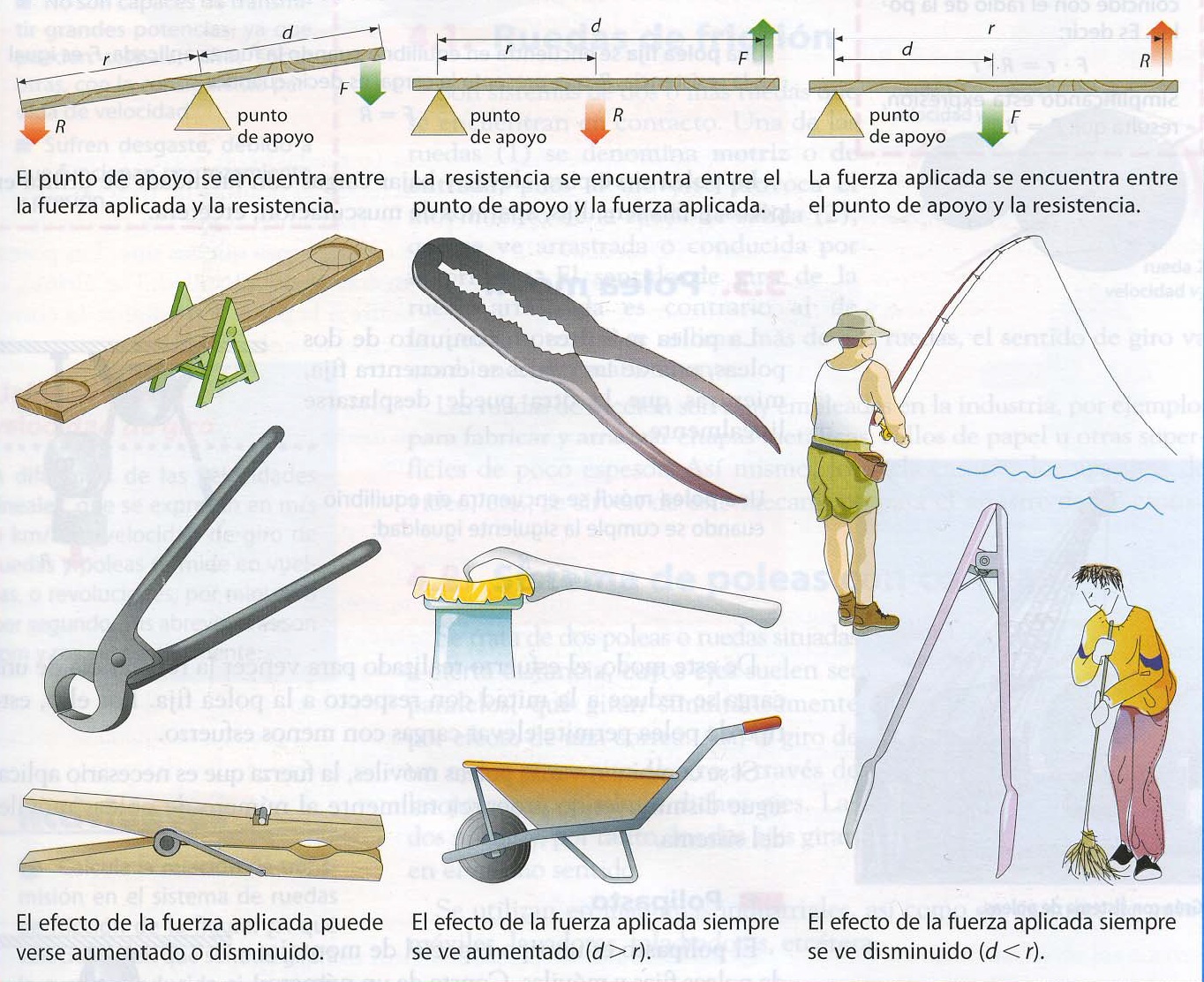
Palancas
Una palanca es una barra rígida que gira en torno a un punto de apoyo o fulcro. En un punto de la barra se aplica una fuerza, F, con el fin de vencer a una resistencia, R, que actúa en otro punto de la barra.
Ley de la palanca
La palanca se basa en un sistema de pares (dos partes en un mecanismo cinemático que conjuntamente producen un movimiento relativo), es decir, las dos partes son la fuerza o resistencia y sus distancias respectivas al punto de apoyo o fulcro. La unidad del sistema de pares es el kilográmetro, es decir, kilogramos por metro. Para resolver los problemas hay que tener en cuenta el peso de la barra rígida.
Ley de la palanca
La palanca se basa en un sistema de pares (dos partes en un mecanismo cinemático que conjuntamente producen un movimiento relativo), es decir, las dos partes son la fuerza o resistencia y sus distancias respectivas al punto de apoyo o fulcro. La unidad del sistema de pares es el kilográmetro, es decir, kilogramos por metro. Para resolver los problemas hay que tener en cuenta el peso de la barra rígida.
| resolucin_de_un_problema_de_palancas_en_el_que_la_palanca_pesa.pdf |
Tipos de palancas
Extraído de: "http://tecnologiadeeso2.blogspot.com.es/p/mecanismos.html"
Por lo que decimos, que las palancas de tercer grado no tienen ventaja mecánica.
Poleas y polipastos
Poleas
Las polea es un disco que puede girar alrededor de su eje y que dispone en el borde de una acanaladura por la que se pasar una cuerda, un cable o una correa. Existen de dos tipos:
Las polea es un disco que puede girar alrededor de su eje y que dispone en el borde de una acanaladura por la que se pasar una cuerda, un cable o una correa. Existen de dos tipos:
- Poleas fijas: si su eje de rotación permanece fijo, por lo que, la fuerza es igual a la resistencia
- Poleas móviles: si su eje de rotación se puede desplazar de forma lineal, por lo que la fuerza es igual a la resistencia entre dos.
| vistas_de_una_polea_y_tipos_de_cuerda.pdf |
| resolucin_de_un_problema_de_poleas_y_polipastos.pdf |
Polipastos
Un aparejo o polipasto es una máquina compuesta por dos o más poleas y una cuerda, cable o cadena que alternativamente va pasando por las diversas gargantas de cada una de aquellas. Se utiliza para levantar o mover una carga con una gran ventaja mecánica porque se necesita aplicar una fuerza mucho menor que la resistencia que hay que mover. Se utiliza en los ascensores y grúas. La fuerza es igual a la resistencia entre dos por el número de poleas móviles

Polipasto eléctrico de cable con cuatro ramales. Extraído de "Wikipedia"
Ruedas de fricción
Son sistemas de dos o más ruedas que se encuentran en contacto. Una de las ruedas se denomina de motriz o de entrada, pues al moverse provoca el movimiento de la rueda de salida, que se ve arrastrada por la otra. El sentido de la giro es contrario, si hay más de varias ruedas se van alternando.
Este tipo de mecanismo tiene los siguientes problemas:
- Ejemplo de resolución de un problema de ruedas de fricción:
En la siguiente igualdad, N equivale a la velocidad (rpm) y D equivale al diámetro.
N1 . D1 = N2 . D2
650 rpm . D1 = 800 rpm . 20 cm
D1 = (800 rpm . 20 cm)/650 rpm
D1 = 24,615 cm
Este tipo de mecanismo tiene los siguientes problemas:
- No transmiten grandes potencias, ya que pueden resbalar unos sobre otras, por lo que, hay una pérdida de velocidad.
- Sufren desgaste, debido a que funcionan por fricción o rozamiento
- Ejemplo de resolución de un problema de ruedas de fricción:
En la siguiente igualdad, N equivale a la velocidad (rpm) y D equivale al diámetro.
N1 . D1 = N2 . D2
650 rpm . D1 = 800 rpm . 20 cm
D1 = (800 rpm . 20 cm)/650 rpm
D1 = 24,615 cm
Sistema de poleas con correa
Se trata de dos poleas o ruedas situadas a cierta distancia que giran a través de una correa. El sentido de giro de ambas ruedas es el mismo. La relación de transmisión, es decir, la formulita es la misma que en las ruedas de fricción. Ejemplos: se utiliza en electrodomésticos y máquinas industriales.
Engranajes o ruedas dentadas
Los engranajes son mecanismos destinados para transmitir potencia de un componente a otro dentro de una máquina. Están formados por dos ruedas dentadas, de las cuales la mayor se denomina corona y la menor piñón. Transmite un movimiento circular. Se utilizan en las bombas hidráulicas, en las cajas de cambios en los coches, entre otras aplicaciones, claramente.
Existen varios tipos de engranajes: helicoidales, cónicos y rectos. El del vídeo anterior, es un engranaje recto. La relación de transmisión, es decir, la formulita es la siguiente: N1 . Z1 = N2 . Z2 (en la igualdad N es la velocidad y Z el número de dientes)
- Ejemplo de resolución de un problema de engranaje.
N1 . Z1 = N2 . Z2
450 rpm . 67 dientes = N2 . 41 dientes
N2 = (450 rpm . 67 dientes)/41 dientes
N2 = 735,366 rpm
- Ejemplo de resolución de un problema de engranaje.
N1 . Z1 = N2 . Z2
450 rpm . 67 dientes = N2 . 41 dientes
N2 = (450 rpm . 67 dientes)/41 dientes
N2 = 735,366 rpm

Se puede apreciar la gran cantidad de engranajes que hay en la carcasa del cambio.
Engranajes locos o intermediarios
En un engranaje como el anterior, la corona y el piñón giran en sentido en contrario. Pero esto a veces no es conveniente, ya que, es necesario que las dos ruedas dentadas giren en el mismo sentido. Para conseguirlo se coloca entre los dos engranajes un tercer engranaje que gira de forma independiente en un eje, y que lo único que hace es invertir el sentido de giro del engranaje conducido. Esta rueda intermedia hace las veces de motora y conducida y por lo tanto no altera la relación de transmisión.

Extraído de "http://concurso.cnice.mec.es/cnice2006/material107/mecanismos/mec_eng_multiplicador.htm"
Sistema de engranajes con correa
Este sistema de transmisión consiste en dos ruedas dentadas de ejes paralelos, situadas a cierta distancia la una de la otra, y que giran a la vez por efecto de una cadena que engrana a ambas. La formulita es la misma que en la de los engranajes
Aplicaciones: cadenas de una bicicleta
Aplicaciones: cadenas de una bicicleta
Tornillo sin fin
Se trata de un tornillo que engrana con una rueda dentada helicoidal, cuyo eje es perpendicular al eje del tornillo. Por cada vuelta del tornillo sin fin acoplado al eje motriz, la rueda dentada al eje de arrastre gira un diente. Se utiliza en las clavijas de una guitarra y en los limpiaparabrisas.
En un tornillo sin fin, la velocidad del tornillo es el producto de la velocidad de la rueda por su número de dientes dividido por el número de entradas del tornillo.
Vocabulario
Entrada: lugar de entrada física para los dientes de la rueda
Resolución de problemas de tornillo sin fin.
Velocidad tornillo = (Velocidad rueda . Número de dientes de la rueda)/Número de entradas.
V = (260 rpm . 24 dientes)/8
V = 780 rpm
Vocabulario
Entrada: lugar de entrada física para los dientes de la rueda
Resolución de problemas de tornillo sin fin.
Velocidad tornillo = (Velocidad rueda . Número de dientes de la rueda)/Número de entradas.
V = (260 rpm . 24 dientes)/8
V = 780 rpm
Tren de poleas con correa

Extraído de "http://e-ducativa.catedu.es/"
Si te pusieran este mecanismo en un examen final, ¿qué harías? Tranquilo ahora te lo digo.
1. Imaginamos que solo existen las poleas negras (en el caso del dibujo)
N1 . D1 = N2 . D2
740 rpm . 15 cm = N2 . 23 cm
N2 = (740 rpm . 15 cm)/23 cm
N2 = 482,61 rpm.
2. Imaginamos que solo existen las poleas rojas (en el caso del dibujo)
¿Pero a qué velocidad iría la polea roja que está insertada en la polea negra?
Pues iría a la misma, ya que, giran en el mismo eje. A este fenómeno se le conoce con el nombre de solidaridad.
N3 . D3 = N4 . D4
482,61 rpm . 10 cm = 150 rpm . D3
D3 = (482,61 . 10 cm)/150 rpm
D3 = 32,174 cm
3. Imaginamos que solo existen las poleas azules (en el caso del dibujo)
En este caso concreto si observamos el dibujo el radio de la polea azul de menor tamaño es la mitad que el radio de la polea roja. Por lo que, si lo calculamos sería 8,0435 cm
N5 . D5 = N6 . D6
150 rpm . 16,087 cm = N6 . 30 cm
N6 = (150 rpm . 16,087 cm)/30 cm
N6 = 80,435 rpm
¡Ea! Ya está resuelto el problemita.
1. Imaginamos que solo existen las poleas negras (en el caso del dibujo)
N1 . D1 = N2 . D2
740 rpm . 15 cm = N2 . 23 cm
N2 = (740 rpm . 15 cm)/23 cm
N2 = 482,61 rpm.
2. Imaginamos que solo existen las poleas rojas (en el caso del dibujo)
¿Pero a qué velocidad iría la polea roja que está insertada en la polea negra?
Pues iría a la misma, ya que, giran en el mismo eje. A este fenómeno se le conoce con el nombre de solidaridad.
N3 . D3 = N4 . D4
482,61 rpm . 10 cm = 150 rpm . D3
D3 = (482,61 . 10 cm)/150 rpm
D3 = 32,174 cm
3. Imaginamos que solo existen las poleas azules (en el caso del dibujo)
En este caso concreto si observamos el dibujo el radio de la polea azul de menor tamaño es la mitad que el radio de la polea roja. Por lo que, si lo calculamos sería 8,0435 cm
N5 . D5 = N6 . D6
150 rpm . 16,087 cm = N6 . 30 cm
N6 = (150 rpm . 16,087 cm)/30 cm
N6 = 80,435 rpm
¡Ea! Ya está resuelto el problemita.
Tren de engranajes
Sigamos con los problemas que tanto os gustan, pero esta vez con un tren de engranajes para que la cosa sea más divertida.

Extraído de "http://www.tecnologia-informatica.es/problemas-de-mecanismos/"
1. El método de resolución es exactamente igual.
N1 . Z1 = N2 . Z2
62 rpm . 10 dientes = N2 . 22 dientes
N2 = (62 rpm . 10 dientes)/22 dientes
N2 = 28,18 rpm
N2 = N3 (ya que son solidarias)
N3 . Z3 = N4 . Z4
28,18 rpm . 10 dientes = N4 . 24 dientes
N4 = (28,18 rpm . 10 dientes)/24 dientes
N4 = 11,742 rpm
¡Ya está resuelto!
N1 . Z1 = N2 . Z2
62 rpm . 10 dientes = N2 . 22 dientes
N2 = (62 rpm . 10 dientes)/22 dientes
N2 = 28,18 rpm
N2 = N3 (ya que son solidarias)
N3 . Z3 = N4 . Z4
28,18 rpm . 10 dientes = N4 . 24 dientes
N4 = (28,18 rpm . 10 dientes)/24 dientes
N4 = 11,742 rpm
¡Ya está resuelto!
Sistema piñón-cremallera
Se trata de un piñón o una rueda dentada de dientes rectos que está engarzado a una cremallera, es decir, una barra dentada. Cuando la rueda dentada gira, la cremallera se desplaza con movimiento rectilíneo.
Aplicaciones:
Aplicaciones:

Lo que está rodeado es un mecanismo piñón-cremallera en una puerta automática.
- Ejemplo de resolución de un problema de sistema piñón-cremallera
Velocidad de avance de la cremallera = La distancia entre dos dientes consecutivos . Número de dientes del piñón . Número de vueltas del piñón; o lo que es lo mismo; L = PZN
L = 3 mm . 20 dientes . 95 rpm
L = 5700 mm/min
- Ejemplo de resolución de un problema de sistema piñón-cremallera
Velocidad de avance de la cremallera = La distancia entre dos dientes consecutivos . Número de dientes del piñón . Número de vueltas del piñón; o lo que es lo mismo; L = PZN
L = 3 mm . 20 dientes . 95 rpm
L = 5700 mm/min
Sistema tornillo-tuerca
Consta de un tornillo o varilla roscada y de una tuerca cuyo diámetro interior coincide con el diámetro del tornillo. Si el tornillo gira y se mantiene fija la orientación de la tuerca, esta avanza con movimiento rectilíneo por el eje roscado y viceversa.
Un ejemplo de aplicación de este tipo de mecanismo es el gato:
Un ejemplo de aplicación de este tipo de mecanismo es el gato:

¡Ups! ¡Yo no me refería a este! Me refería al siguiente:

Conjunto manivela-torno
Una manivela es una barra que está unida a un eje al que hace girar. La fuerza necesaria para que el eje gire menor que la que habría que aplicarle directamente. El mecanismo que se basa en este dispositivo es el torno, que consta de un tambor que gira alrededor de su eje a fin de arrastrar un objeto. La cuerda que está en el tambor forma una una hélice (una forma geométrica de tipo espiral)
Un torno se halla en equilibrio cuando se cumple la siguiente ecuación:
Fuerza aplicada . Medida del brazo de la manivela = Resistencia . Radio del torno
Aunque en teoría sería posible levantar cualquier peso con un torno adecuado, en la práctica hay que tener en cuenta el problema de la resistencia de los materiales, que hace desaconsejable fabricar una manivela demasiado larga.
Un torno se halla en equilibrio cuando se cumple la siguiente ecuación:
Fuerza aplicada . Medida del brazo de la manivela = Resistencia . Radio del torno
Aunque en teoría sería posible levantar cualquier peso con un torno adecuado, en la práctica hay que tener en cuenta el problema de la resistencia de los materiales, que hace desaconsejable fabricar una manivela demasiado larga.

Extraído de "http://aliciadiazcobo.wordpress.com/2010/02/13/mecanismo-manivela-torno/"
Se utiliza para enrollar toldos y en las grúas.
-Ejemplo de resolución de un problema de manivela-torno
Fuerza aplicada . Medida del brazo de la manivela = Resistencia . Radio del torno
F . 25 cm = 65 kg . 10 cm
F = (65 kg . 10 cm)/25 cm
F = 26 kg
-Ejemplo de resolución de un problema de manivela-torno
Fuerza aplicada . Medida del brazo de la manivela = Resistencia . Radio del torno
F . 25 cm = 65 kg . 10 cm
F = (65 kg . 10 cm)/25 cm
F = 26 kg
Reto tecnológico
1. Tenemos una bicicleta que tiene un plato de 35 dientes que transmite la velocidad al piñón que tiene 10 dientes. Este ciclista pedalea 50 veces en un minuto y las ruedas tienen un diámetro de 60 cm. ¿A cuántos km/h va el ciclista?
